Краткая история робототехники
08.03.2022
https://tass.ru/kosmos/6780796
Робототехника развивалась бок о бок с цивилизацией. За последние 100 лет роботы претерпели существенные изменения и взошли на новый виток развития. Если раньше робототехника подразумевала создание механической конструкции, которая выполняла действия, подобные человеческим, то сегодня, робототехника — совсем другие технологии. Сами роботы давно переросли человеческие размеры (как в большую, так и в меньшую сторону) и расширили способности. В XXI веке основам робототехники обучаются с малого возраста, так как будущее человечества неразрывно связано с этой областью.
Андроиды в средние века

https://xfile.ru/x-files/science/android_alberta_velikogo/
Многие исследователи говорят о том, что предпосылки возникновения робототехники уходят корнями в древние времена, когда воздвигали статуи Богов с подвижными частями тела. Даже в «Иллиаде» Гомер упоминает роботов: Гефест создавал механических служанок.
В средние века популярностью пользовались автоматы, которые приводились в движение с помощью несложных механизмов, а также механические часы с фигурками людей.
В XIII веке немецкий ученый Альберт Великий изобрел прототип первого андроида: металлическая фигура была ростом с человека и открывала дверь, когда в нее стучали. Над этим проектом он трудился 30 лет. Вокруг изобретения ходили легенды и о том, что робот разговаривал и с каждым годом становился все более болтливым, хотя достоверных подтверждений этому нет. Тем не менее тенденция к созданию человекоподобных моделей получила развитие: в XV немецкий механик Турианус собрал механическую куклу, играющую на флейте. Затем в Италии появилась девочка-робот, которая играла на цитре и танцевала, а в Германии появился роботизированный театр из маленьких фигурок пекаря, маляра и булочника. Кстати, Восток тоже не стоял на месте. В Японии были популярны чайные куклы, которые приносили чай гостям.
Следующий этап развития
https://history-doc.ru/izobretateli/zhozef-mari-zhakkard/
В XVIII веке наступил расцвет часового мастерства, что привело к новому витку развития андроидов. Механики создавали роботов, умеющих писать, рисовать, играть на музыкальных инструментах. Однако все созданные модели подходили для развлечения и не выполняли практических задач. Вместе с угасанием часового дела начал ослабевать и интерес к робототехнике.
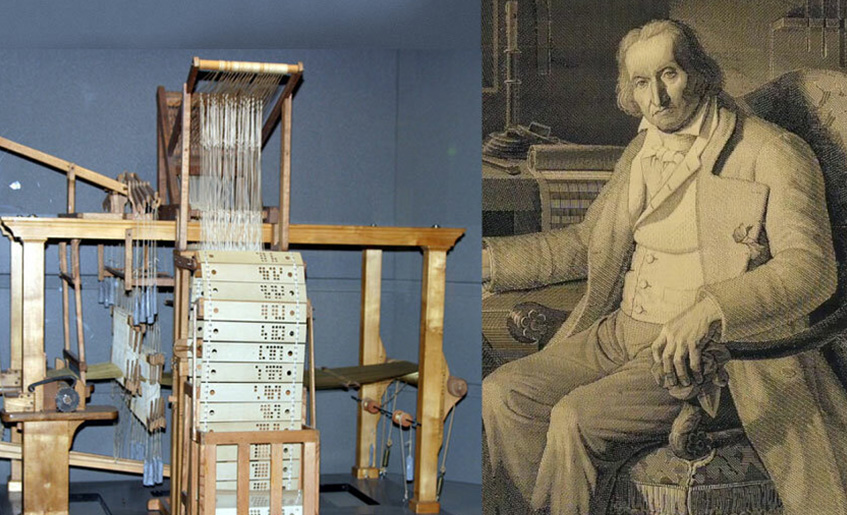
В 1805 году французский торговец Жозеф Мари Жаккар разработал автоматический станок, на котором производили ткани с заранее запрограммированным рисунком с помощью перфокарт. Ученые считают, что изобретение данного станка — важнейшее событие, которое наметило дальнейший технический прогресс. В середине XIX века российский ученый Семен Корсаков поставил задачу создания «умных» машин и описал свои первые работы, в которых использовал перфокарты как базы знаний.
Полноценный интерес к робототехнике вернулся в XX веке вместе с развитием электротехники и электроники. Роль катализатора развития в этот период сыграла, как ни странно, литература. Появилось множество произведений, в которых фигурировали роботизированные системы и, в частности, андроиды.
Современная робототехника
https://fishki.net/2171520-lunohod-1--pervyj-uspeshnyj-lunnyj-planetohod-perevod-wwwspacecom-ssha.html
Теоретической основой современной робототехники стала кибернетика, а точнее бионика. Современная робототехника появилась лишь во второй половине XX века, так как именно в это время назрела необходимость роботов-машин, без которых невозможно развернуть комплексную роботизацию производства. Так, с 1950-х годов началось активное внедрение на производство манипуляторов. Самые первые появились для атомных исследований, затем для глубоководной техники, металлургии и тд. Системы популярны до сих пор и постоянно совершенствуются: теперь манипуляторы доступны для домашнего использования.
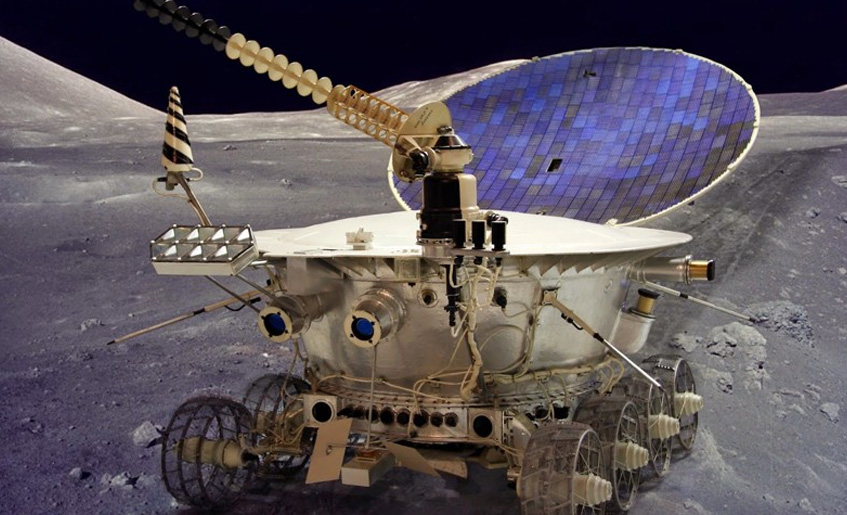
Первый робот с зачатками искусственного интеллекта и зрения был создан в 1968 году и мог объезжать предметы, хотя был неустойчивым. Однако ученые говорят о появлении серьезной современной робототехники в 1970 году, когда «Луноход-1» успешно начал работать на поверхности Луны. В этот же период появились микропроцессорные системы управления, которые заменили специализированные блоки управления роботов на программируемые контроллеры. Это позволило уменьшить стоимость моделей в три раза. В 1982 году в IBM разработали официальный язык для программирования робототехнических систем, а спустя два года компания Adept представила первый робот Scara с электроприводом. В 1986 году роботы были впервые применены в Чернобыле для очистки радиоактивных отходов.
В конце века возродился интерес к андроидам. Появились модели, способные двигаться по лестнице и преодолевать другие препятствия, выполнять сложные манипуляции и вести диалог с человеком.
С тех пор ежегодно парк роботов начал возрастать в среднем на 20%. До 2000-х это были преимущественно промышленные роботы, после — сервисные. В 2000-м году, согласно данным ООН, в мире использовалось 742 500 промышленных роботов.
Промышленные роботы XX — XXI века делят на три поколения:
- Первое поколение — роботы, имеющее промышленное управление, заимствованное у станков с ЧПУ.
- Второе поколение — роботы с сенсорными датчиками, главные из которых — сенсорное зрение и адаптивное управление.
- Третье поколение — интеллектуальные роботы, при создании которых преимущественно используются методы искусственного интеллекта.
Согласно прогнозам ученых, роботы четвертого поколения будут представлять собой разумных роботов (искусственный интеллект + способность к творчеству).